SBGYW-18機電一體化智能實訓(xùn)系統(tǒng)
一�����、產(chǎn)品概述
機電一體化智能實訓(xùn)系統(tǒng)、可編程控制器實訓(xùn)室設(shè)備:主要承擔(dān)機電一體化技術(shù)�����、智能控制技術(shù)等專業(yè)的實驗教學(xué)任務(wù)�����。主要支撐《PLC原理及應(yīng)用技術(shù)》���、《變頻器技術(shù)》�、《組態(tài)技術(shù)》���、《電氣控制技術(shù)》等課程的基礎(chǔ)實驗��、綜合課程設(shè)計和畢業(yè)設(shè)計�����。
(一)體現(xiàn)學(xué)生的教學(xué)主體地位
機電一體化智能實訓(xùn)裝置�����、機電一體化加強智能制造實訓(xùn)室設(shè)備構(gòu)建�����,能夠發(fā)揮驕傲強的積極作用���,將理論與實踐相結(jié)合,促使抽象的理論知識更加形象的展現(xiàn)在學(xué)生面前�,幫助學(xué)生將所學(xué)的理論知識迅速轉(zhuǎn)化成為實踐經(jīng)驗。在教學(xué)實踐中����,學(xué)生處于主體地位,但是傳統(tǒng)意義上的機電一體化教學(xué)常常忽視這一重點��,導(dǎo)致學(xué)生強行接受教師傳授的知識內(nèi)容���,缺乏個人思考與理解�。通過智能制造實訓(xùn)室的構(gòu)建��,學(xué)生能夠更加自主地開展學(xué)習(xí)��。實訓(xùn)室可以幫助學(xué)生加強對機電一體化相關(guān)知識的了解���,依照課程內(nèi)容與教學(xué)目標(biāo)進行系統(tǒng)化聯(lián)系�����,加強理論與實踐的融合��,進而提高教學(xué)實踐能力��。在這一過程中���,學(xué)生的教學(xué)主體地位得到體現(xiàn)�����,能夠在時間學(xué)習(xí)之中更加深入的了解實際工作�,并在此基礎(chǔ)上提升實踐能力���。尤其是智能制造實訓(xùn)之中應(yīng)用可編程控制技術(shù)��,使得學(xué)生能夠拓寬學(xué)習(xí)范圍�,使學(xué)習(xí)更加專業(yè)具體��。
(二)構(gòu)建專業(yè)綜合性實訓(xùn)
機電一體化教學(xué)對實訓(xùn)平臺的構(gòu)建要求相對較多���,需要學(xué)校結(jié)合實際的教學(xué)情況���,加強規(guī)劃與設(shè)計��,形成更加系統(tǒng)�����、更加多功能的教學(xué)實訓(xùn)體系,并在此基礎(chǔ)上構(gòu)建出機電一體化的智能制造實訓(xùn)室����,更加高效的開展教學(xué),結(jié)合企業(yè)實際生產(chǎn)任務(wù)設(shè)計實訓(xùn)內(nèi)容����,使實訓(xùn)更加有效科學(xué),保障實訓(xùn)教學(xué)的質(zhì)量����。同時,實訓(xùn)室能夠為學(xué)校提供更多的活動機會���,不但可以通過實訓(xùn)室開展多種競賽�,也能夠利用實訓(xùn)室展示學(xué)生的學(xué)習(xí)成果。另外��,智能制造實訓(xùn)室可以承辦企業(yè)職工職業(yè)培訓(xùn)與技能比賽�,同時也能夠進行教師培訓(xùn)。這樣可以保障實訓(xùn)室的綜合性與可適用性��,促使機電一體化智能制造實訓(xùn)室發(fā)揮出更加高效的作用��。
(三)提升教師的實訓(xùn)教學(xué)能力
機電一體化智能實訓(xùn)設(shè)備����、智能制造實驗室構(gòu)建的過程中,學(xué)校教師能夠參與其中��,尤其是青年教師�,可以通過構(gòu)建過程的參與更加了解實訓(xùn)室的應(yīng)用。教師在構(gòu)建前期可以參與調(diào)研與資料收集����,并進一步對資料進行數(shù)據(jù),使實訓(xùn)室的構(gòu)建更加科學(xué)����。在這一過程中,教師的專業(yè)素養(yǎng)得到培養(yǎng)���,能夠為后續(xù)教學(xué)建立良好的基礎(chǔ)[1]�����。同時���,在實訓(xùn)室設(shè)備選擇以及安裝時��,教師可以加強對設(shè)備的了解����,結(jié)合課內(nèi)教學(xué)內(nèi)容豐富自身的知識體系��,更好地掌握實訓(xùn)教學(xué)的重點�����。在實訓(xùn)室建成之后��,教師能夠?qū)嵱?xùn)室產(chǎn)生較為深入的了解����,并在此基礎(chǔ)上掌握實訓(xùn)室各個系統(tǒng)與各項設(shè)備的具體操作方法���。通過這樣的方式��,教師的教學(xué)能力會進一步提升�,可以積極展開對學(xué)生綜合能力的培養(yǎng),促使學(xué)生可以更早的接觸工作內(nèi)容��,掌握復(fù)雜的知識體系����。
二、 技術(shù)性能要求
1. 輸入電源:單相220V±10% 50Hz
2. 工作環(huán)境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔≤4000m
3. 裝置容量:≤1kVA
4. 重量:100kg左右
5. 外形尺寸:約1300mm×1200mm×750mm
6. 臺面平鋪2020歐標(biāo)工業(yè)鋁材�����、右側(cè)臺面鋪400×1000mm軟絕緣膠墊�����,中部抽拉式電氣接線板����。
7. 安全保護:具有漏電壓、漏電流保護裝置�,安全符合國家標(biāo)準
三、基本配置及功能要求
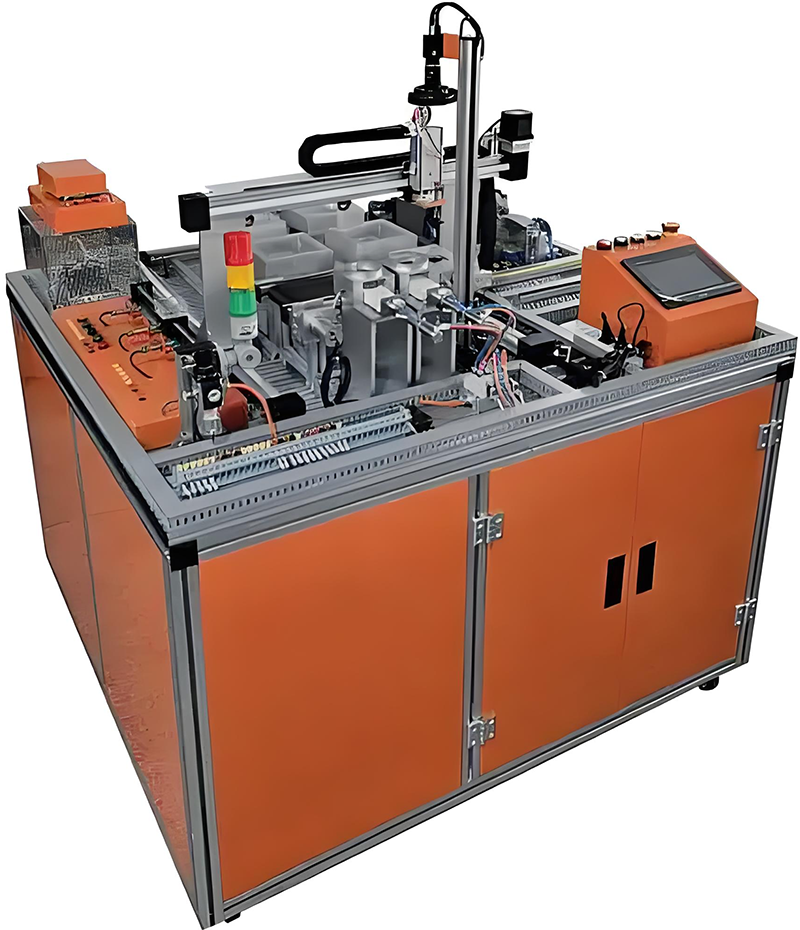
★1��、實訓(xùn)裝置包括電氣接線模塊、上料模塊�、輸送線模塊、視覺識別模塊����、三維模組控制模塊、稱重模塊�����、RFID產(chǎn)品溯源模塊����、物料擺放模塊、小車運動控制模塊����、溫控箱變頻控溫模塊�����。提供符合上述要求的裝置整體設(shè)計效果圖��。
2���、以上模塊對應(yīng)以下單元:PLC單元��、485通信單元���、工業(yè)視覺識別單元����、RFID產(chǎn)品溯源單元���、氣動控制基本單元����、變頻調(diào)速單元��、觸摸屏單元�����、以太網(wǎng)交換機����、伺服系統(tǒng)控制單元等組成、溫度檢測變送單元。
3.1 PLC單元 西門子主機1511C
帶顯示屏的 CPU��;工作存儲器可存儲 175 KB 代碼和 1 MB 數(shù)據(jù)�����;位指令執(zhí)行時間 60 ns����;4 級防護機制,工藝功能��,運動控制�,閉環(huán)控制,計數(shù)與測量���;跟蹤功能�;PROFINET IO 控制器����,支持 RT/IRT,性能升級 PROFINET V2.3���,雙端口,智能設(shè)備,支持 MRP���、MRPD���,傳輸協(xié)議 TCP/IP,安全開放式用戶通信����,S7 通信,Web 服務(wù)器����,DNS 客戶端,OPC UA 服務(wù)器數(shù)據(jù)訪問���,恒定總線循環(huán)時間���,路由功能;運行系統(tǒng)選件�,固件版本 V2.5,帶 DI16/DQ16�����,AI5/AQ2,數(shù)字量輸入模塊 DI 16xDC24V�����,16 個一組����;數(shù)字量輸出模塊 DQ 16xDC24V/0.5A,16 個一組�;模擬量輸入模塊 AI 4xU/I、AI 1xRTD���,16 位�,5 個一組����;模擬量輸出模塊 AQ 2xU/I,16 位����,2 個一組;6 個通道用于計數(shù)與測量�����,帶增量式編碼器 24 V(最高 100 kHz);4 個通道用于 PTO�,脈寬調(diào)制�,頻率輸出(最高 100 kHz)
視覺識別單元
四、基本要求:
1�����、工業(yè)視覺檢測系統(tǒng)包括相機���、鏡頭����、處理軟件����、光源等組成。工業(yè)視覺檢測系統(tǒng)放置在輸送線一測����,對工件進行顏色,尺寸����,標(biāo)識等信息檢測�����。
2��、檢測結(jié)果通過總控通訊�����,為后續(xù)擺放等作業(yè)做好準備�。
3�����、600 萬像素 1/1.8" CMOS 千兆以太網(wǎng)工業(yè)面陣相機��,傳感器類型CMOS�、卷簾快門,傳感器型號 Sony IMX178����,像元尺寸 2.4 ?m × 2.4 ?m,靶面尺寸 1/1.8"��,分辨率 3072 × 2048����,動態(tài)范圍 71.3 dB�����,曝光時間 25 μs ~ 2.5 sec,快門模式 支持自動曝光�����、手動曝光��、一鍵曝光模式�,支持 Global Reset 和 Trigger Rolling功能,像素格式Mono 8/10/12 Bayer RG 8/10/10Packed/12/12Packed YUV422Packed���,YUV422_YUYV_Packed RGB 8�,BGR 8��,數(shù)據(jù)接口 Gigabit Ethernet(1000Mbit/s)兼容 Fast Ethernet(100Mbit/s)���,數(shù)字 I/O 6-pin P7接頭提供供電和 I/O:1路光耦隔離輸入(Line0)�����,1路光耦隔離輸出(Line1)��, 1 路雙向可配置非隔離 I/O(Line2)
4��、鏡頭:鏡頭接口 C-Mount 外形尺寸 29 mm × 29 mm × 42 mm
5����、連接電纜與支架
五、軟件要求
1.軟件可進行曝光時間���,白平衡設(shè)置���。
c.進行四點相機標(biāo)定,能快速讀取標(biāo)定模板的像素值��,可獲取對應(yīng)的位置值����。
2.可進行日志顯示,并可以清楚歷史日志�。
3.可進行至少8個模板匹配,即觸發(fā)1次拍照�,匹配模板1,模板1匹配成功���,發(fā)出模板1數(shù)據(jù)�;若模板1未能匹配成功,視覺返回s1,0,0,0數(shù)據(jù)給機器人���,機器人發(fā)命令繼續(xù)匹配模板�;
f.可進行發(fā)送可接收數(shù)據(jù)顯示����。
4�����、軟件輸出4個數(shù)據(jù):類型�、X、Y�、旋轉(zhuǎn)量
h.支持繪制的模板可以進行集合運算;
i.繪制模板可以使用長方形���,圓形�����,自由繪制等方式進行繪制模板�����;
5.在機器人視覺系統(tǒng)軟件中�����,拍照的圖像可以自由的拖動及放大�;
k.支持實時采集及單獨拍照;
6.在機器人視覺系統(tǒng)軟件中�����,有紅色十字光標(biāo)方便安裝調(diào)節(jié)相機位置���。
7.RFID識別單元:RFID射頻單元帶集成天線的方型讀寫器(RS422)����;50×50×30 mm(L×D×H)
標(biāo)簽使用螺紋式小尺寸標(biāo)簽�。
8. 觸摸屏單元(步科品牌)
8.1顯示模塊:≥7"TFT
8.2顯示色彩:≥65536彩色
8.3分辨率:≥800×480像素
8.4背光類型:≥LED 亮 度 300cd/m2
8.5液晶壽命: ≥50000小時
8.6觸控面板:4線精密電阻網(wǎng)絡(luò)(表面硬度不低于4H)
8.7CPU: ≥800MHz RISC
8.8存儲器: ≥128MB閃存+64MB 內(nèi)存 RTC
8.9通訊接口:COM0:RS485-2W/4W, RS232; COM2: RS232
9. 以太網(wǎng)交換機:
9.1以太網(wǎng)交換機采用非網(wǎng)管型工業(yè)以太網(wǎng) 100MBIT/S交換機,自帶5個雙絞線端口��,RJ45 接口���;
9.2用于構(gòu)建小型星形和總線形拓撲結(jié)構(gòu)�;自帶LED診斷顯示,供電電源DC 24V �����。
9.3不低于IEC/EN 61000-4工業(yè)級防護���,不低于IP30防護�����,9.6-60VDC三冗余電源輸入����,多重保護����。
10. 變頻調(diào)速單元:
10.1單相220V供電�����,輸出功率0.37KW���。
10.2集成RS-485通訊接口�����,提供操作面板��;
10.3具有線性V/F控制��、平方V/F控制�����、可編程多點設(shè)定V/F控制�,磁通電流控制、直流轉(zhuǎn)矩控制�����;
10.4集成4路數(shù)字量輸入�,2路模擬量輸入;
10.5具備過電壓�����、欠電壓保護���,變頻器����、電機過熱保護,短路保護等�����。
11.小車運動控制單元:主要由運動小車(直流電機驅(qū)動)�����、同步帶輪傳動機構(gòu)�、直流電機、光電傳感器�、電感式傳感器、電容式傳感器����、行程開關(guān)等組成�����,通過傳感檢測�、PLC編程,實現(xiàn)運動距離測量、傳動控制����、鍵值優(yōu)化比較行走控制、定向控制����、報警運行控制、點動控制等���,能實現(xiàn)小車的精確定位��。該系統(tǒng)外觀精美��,體積緊湊���,重量輕。提供符合上述功能的小車運動控制單元設(shè)計效果圖�����。
12.三維模組控制單元:
12.1三維絲桿或同步帶控制單元主要由伺服驅(qū)動和步進驅(qū)動組成����。
12.2伺服驅(qū)動用于控制X軸�����,采用交流伺服驅(qū)動���,工作電壓AC220V,輸出功率200W�����。
12.3采用數(shù)字信號處理器(DSP)作為控制核心���,智能功率模塊(IPM) 內(nèi)部集成了驅(qū)動電路,同時具有過電壓�����、過電流�、過熱����、欠壓等故障檢測保護電路,具有較強的溫度�����、濕度�、振動等環(huán)境適應(yīng)能力和很強的抗干擾的能力。
12.4支持位置����、速度和力矩三種方式對伺服馬達進行控制。
12.5步進電機驅(qū)動用于控制Y軸�,采用交流伺服驅(qū)動,工作電壓DC24V����,輸出功率>=30W;
12.6內(nèi)部集成控制電路和功率電路�,具有自檢線圈和短路保護等功能。
13. 溫控箱變頻控溫模塊:加熱板通電加熱�����,溫度變送器檢測加熱板到達一定溫度后�,PLC控制系統(tǒng)控制臺達變頻器使電機旋轉(zhuǎn),帶動扇葉加強空氣流動�����,快速散熱��,使箱內(nèi)環(huán)境溫度穩(wěn)定。�����。
14.溫變變送器��。
14.1二線制輸出���,無需補償導(dǎo)線���;
14.2要求溫變變送器結(jié)構(gòu)簡單安裝方便,使用壽命≥10000次���;
14.3結(jié)構(gòu)簡單����,合理安裝方便�����;小型化�����,安全可靠,使用壽命長����;
14.4插頭式溫度變送器��,量程0-100OC��,電源24VDC���,輸出0-10V�����。
15.加熱器:工作電壓AC220V��、持續(xù)功率30W-150W����、外殼材質(zhì)鋁合金�、尺寸不大于160*100。
16. 伺服系統(tǒng)控制單元:輸入電源單相或三相AC220V�����,-15~+10%,50/60HZ�,調(diào)速比1:5000,脈沖頻率<500KHZ,控制輸入:伺服使能��、報警復(fù)位����、緊急停止、指令脈沖禁止�、脈沖偏差清除、零件速鉗位��、正向行程限位����、反向行程限位、內(nèi)部速度選擇1等�。控制輸出:伺服準備好���、定位完成�����、零偏差�����、零速度��、報警檢出���、緊急停止檢出,
17.稱物體重量或壓力并觸摸屏顯示重量值:稱重傳感器��、重量變送器����、稱重不銹鋼承重板,可稱重0-10KG�����。
六�����、實訓(xùn)項目
1. PLC認知實訓(xùn)(軟硬件結(jié)構(gòu)��、系統(tǒng)組成、基本指令�、接線、編程下載等)
(一)PLC虛擬控制應(yīng)用實訓(xùn)
1. 數(shù)碼顯示控制
2. 搶答器控制
3. 天塔之光控制
4. 音樂噴泉控制
5. 十字路口交通燈控制
6. 水塔水位控制
7. 自動送料裝車系統(tǒng)控制
8. 四節(jié)傳送帶控制
9. 裝配流水線控制
10. 多種液體混合裝置控制
11. 自動洗衣機控制
12. 貨物分揀機控制
13. 自動售貨機控制
(二)PLC實物控制應(yīng)用實訓(xùn)
14. 視覺識別控制
15. RFID控制
16. 長度定長控制
17. 稱重控制
18. 氣動基本回路控制
19. 直線運動位置檢測���、定位控制
20. 步進電機定位控制
21. 步進電機的速度控制
22. 步進電機的正反轉(zhuǎn)控制
23. 伺服電機定位控制
24. 伺服電機的速度控制
25. 伺服電機的正反轉(zhuǎn)控制
26. 伺服電機和步進電機的綜合控制
(三)PLC�、變頻器�����、觸摸屏綜合應(yīng)用技能實訓(xùn)
27. 變頻器功能參數(shù)設(shè)置與操作
28. 外部端子點動控制
29. 變頻器控制電機正反轉(zhuǎn)
30. 多段速度選擇變頻調(diào)速
31. 變頻器無級調(diào)速
32. 外部模擬量方式的變頻調(diào)速控制
33. 基于PLC的變頻器外部端子的電機正反轉(zhuǎn)控制
34. 基于PLC模擬量方式變頻開環(huán)/閉環(huán)調(diào)速控制
35. 基于PLC通信方式的變頻開環(huán)調(diào)速
36. 基于觸摸屏控制方式的基本指令編程練習(xí)
37. 基于觸摸屏控制方式的數(shù)碼顯示控制
(四)網(wǎng)絡(luò)通訊綜合實訓(xùn)
38. PLC與變頻器RS485通訊實訓(xùn)
39. PLC��、觸摸屏與變頻器通信控制
40. PLC主機之間PROFINET通訊實訓(xùn)
41. PLC���、變頻器�、觸摸屏組網(wǎng)綜合應(yīng)用實訓(xùn)
42�����、PLC與RFID通訊控制
43��、PLC與工業(yè)相機通訊